请告诉我们您的知识需求以及对本站的评价与建议。
满意 不满意
Email:
广州地铁盾构施工控制测量措施
栏目最新
- 东莞至惠州城际铁路隧道安全风险评估与管理
- 高层建筑给排水系统安装施工技术
- 高层建筑施工质量的五个控制要点
- 房屋建筑工程质量问题、原因和防止措施
- 地下停车场防水工程施工质量预控措施
- 试析绿色施工技术在建筑工程中的应用
- 施工企业预算管理措施及案例分析
- 岩溶地区隧道施工综合预报技术案例分析
- 预制块镶面现浇混凝土隧道洞门施工方法
- 建筑施工模板应用技术简析
网站最新
内容提示:以广州地铁盾构施工为背景,介绍盾构施工中不同阶段的测量方法,根据盾构机的结构、姿态、定位特点进行深入探讨并采取有效测量措施,保证盾构以正确姿态按设计掘进和贯通,最后阐述贯通后的相关测量工作。
摘 要:以广州地铁盾构施工为背景,介绍盾构施工中不同阶段的测量方法,根据盾构机的结构、姿态、定位特点进行深入探讨并采取有效测量措施,保证盾构以正确姿态按设计掘进和贯通,最后阐述贯通后的相关测量工作。(参考《建筑中文网》)
关键词:广州地铁;盾构施工;测量措施;贯通
1 引 言
随着经济全球化发展和改革开放的深入,广州城市经济发展迅速,城市交通问题突出,在高楼密集、道路拥挤的广州解决交通问题,以安全、快捷、环保著称的地铁是首选。广州地铁自1993年开工建设以来,经过十来年地铁工程建设,先后开通了4条地铁线路,舒缓了广州的交通压力。
广州地铁建设取得重大的成功之一是盾构技术的引用。广州地铁以修建地铁一号线为契机,采取国际招标的方式在软土和复合地层中修建了地铁隧道。尤其是广州地区复合地层盾构的成功实践,结束了关于广州地区修建隧道宜采用矿山法还是盾构法的争论。在一号线取得成功经验的基础上,广州地铁在其二、三、四、五号和广佛线路大幅度采用盾构技术(广州地铁盾构施工情况见表1)。
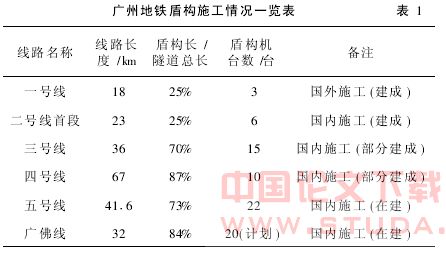
地铁是一个综合体,建设一条高质量的地铁,是由多学科综合技术构成的,除了高标准的设计、先进的施工设备、工艺、材料外,主要还取决于施工的精度,所以有效合理的测量措施是实现高标准设计和施工精度(横向贯通≤±50mm,纵向贯通≤±25mm)的重要保证。
2 盾构施工前测量
2.1 控制点复测
(1)平面控制点复测
平面控制点是为地铁施工沿线路方向测设的精密导线点,使用前必须按技术要求进行复测,其主要技术要求:
①导线测角中误差≤±2.5″;
②导线测距中误差≤±6mm;
③导线方位角闭合差
④导线测距相对中误差≤1/60000;
⑤导线全长相对闭合差≤1/35000;
⑥相邻点的相对点位中误差≤±8mm;
⑦导线最弱点的点位中误差≤±15mm;
⑧导线附(闭)合长度3~5km;
(2)高程控制点复测
①观测方法:
奇数站上为:后—前—前—后;
偶数站上为:前—后—后—前。
②主要技术要求:
每千米高差中数偶然中误差≤±2mm;每千米高差中数全中误差≤±4mm
观测次数:往返测各1次;平坦地往返附合或环线闭和差
2.2 施工测量方案设计
测量方案是根据本标段工程实际情况,布置地上平面、高程加密控制点和地下平面、高程控制点,对控制桩的保护措施做好联系测量的方案,计算因控制网而造成盾构区间贯通的误差分析以及在施工测量放样的具体方法等。
2.3 地面平高控制点加密
(1)导线点加密测量:利用现有的GPS点和精密的精度为 (L为水准线路长度,以km计)。
(L为水准线路长度,以km计)。
2.4 联系测量
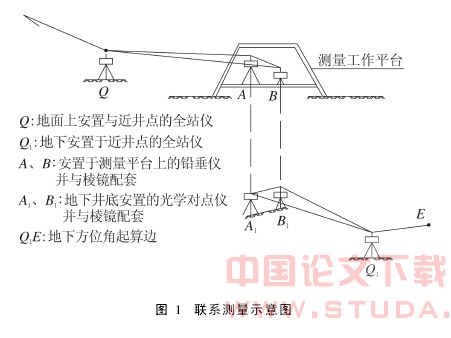
(1)定向联系测量
定向原理:见图1,测量仪器是全站仪 反射片,在整个施工过程中,坐标传递4次。井上、井下联系三角形满足下列要求:
①两悬吊钢丝间距处不小于6m。
②定向角α应小于3°。
③a/c及a'/c'的比值小于1.5倍。
联系三角形边长测量,每次独立测量3测回,每测回往返3次读数,各测回较差在地上小于0.5mm,在地下小于1.0mm。地上与地下测量同一边的较差小于2mm。角度观测,用全圆测回法观测4测回,测角中误差在±4″之内。各测回测定的地下起始边方位角较差不大于20″,方位角平均值中误差应在±12″之内。联系三角形一次定向独立进行3测回,每测回后,变动2个吊锤位置重新进行定向测量,共有3套不同的完整观测数据。
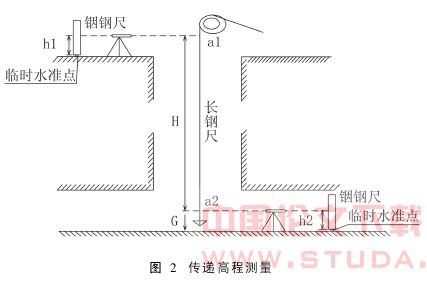
(2)高程联系测量
整个区间施工中,高程传递至少3次。传递高程的地下近井点不少于2个,并对地下高程点间的几何关系进行检核。
测量近井水准点的高程线路应附合在地面相邻精密水准点上。采用在竖井内悬吊钢尺的方法进行高程传递时,地上和地下安置的2台水准仪应同时读数,每次独立观测3测回,每测回变动仪器高度,3测回得地上、地下水准点的高差较差应小于3mm,并在钢尺上悬吊与钢尺检定时相同质量的重锤。3测回测定的高差进行温度、尺长修正。传递高程测量(见图2)
3 盾构施工中测量
3.1 施工控制测量
盾构施工控制测量最大特点是所有的控制导线点和控制水准点均处运动状态,所以盾构施工测量中导线的后延伸测量和水准点的复测显得尤为重要。
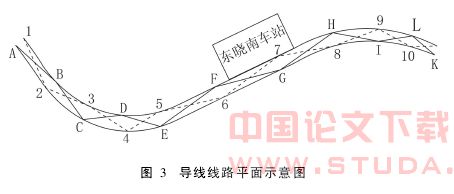
(1)地下导线测量
广州地铁采用双支导线的方法,双支导线每前进一段交叉一次。每一个新的施工控制点由2条路线传算坐标。当检核无误,最后取平均值作为新点的测点数据。线路平面示意图如图3。
地下导线测设要求:
①导线直线段约150m布设一个控制导线点,曲线段控制导线点(包括曲线要素上的控制点)布设间距不少于60m。
②按Ⅳ等导线的技术要求施测.每次延伸施工控制导线测量前,对已有的施工控制导线前3个点进行检测无误后再向前延伸。
③施工控制导线在隧道贯通前测量5次,其测量时间与竖井定向同步。当重合点重复测量的坐标值与原测量的坐标值较差小于10mm时,采用逐次的加权平均值作为施工控制导线延伸测量的起算值。
④在掘进1000m和2000m时,加测陀螺方位角加以校核。
3.2 盾构机始发测量
(1)盾构机导轨定位测量
盾构机导轨测量主要控制导轨的中线与设计隧道中线偏差不能超限,导轨的前后高程与设计高程不能超限,导轨下面是否坚实平整等,见图4、图5。

(2)反力架定位测量
反力架定位测量包括反力架的高度、俯仰度、偏航等,反力架下面是否坚实、平整。反力架的稳定性直接影响到盾构机始发掘进是否能正常按照设计的方位进行。
盾构机姿态初始测量包括测量水平偏航、俯仰度、扭转度。盾构机的水平偏航、俯仰度是用来判断盾构机在以后掘进过程中是否在隧道设计中线上前进,扭转度是用来判断盾构机是否在容许范围内发生扭转。盾构机姿态测量原理。盾构机作为一个近似圆柱的三维体,在开始隧道掘进后我们是不能直接测量其刀盘的中心坐标的,只能用间接法来推算。在盾构机壳体内适当位置上选择观测点就成为必要,这些点既要有利于观测,又有利于保护,并且相互间距离不能变化。在图6中,O点是盾构机刀盘中心点,A点和B点是在盾构机前体与中体交接处,螺旋机根部下面的2个选点。C点和D点是螺旋机中段靠下侧的2个点,E点是盾构机中体前断面的中心坐标,A、B、C、D4点上都贴有测量反射镜片。由A、B、C、D、O5点所构成的2个四面体中,测量出每个角点的三维坐标(xi,yi,zi)后,把每个四面体的4个点之间的相对位置关系和6条边的长度L计算出来,作为以后计算的初始值,在以后的掘进过程中,Li将是不变的常量(假设盾构机掘进过程中前体不发生太大形变),通过测量A、B、C、D4点的三维坐标,用(x,y,z)、L就能计算出O点的三维坐标。
用同样的原理,A、B、C、D、E5点也可以构成2个四面体,相应地E点的三维坐标也可以求得。由E、O 2点的三维坐标和盾构机的绞折角就能计算出盾构机刀盘中心的水平偏航、垂直偏航,由A、B、C、D4点的三维坐标就能确定盾构机的扭转角度,从而达到了检测盾构机的目的。
(4)SLS-T导向系统初始测量
SLS-T导向系统初始测量包括:隧道设计中线坐标计算,TCA(智能型全站仪)托架和后视托架的三维坐标的测量,VMT初始参数设置和掘进等工作。
①隧道设计中线坐标计算:将隧道的所有平面曲线要素和高程曲线要素输入VMT软件,VMT将会自动计算出每间隔1m里程的隧道中线的三维坐标。隧道中线坐标需经过其他办法多次复核无误后方可使用。
②TCA托架和后视托架的三维坐标的测量:TCA托架上安放全站仪,后视托架上安放后视棱镜。通过人工测量将TCA托架和后视托架的中心位置的三维坐标测量出来后,作为控制盾构机姿态的起始测量数据。
③VMT初始参数设置:将TCA的中心位置的三维坐标以及后视棱镜的坐标、方位角(单位以g计算)输入控制计算机“station”窗口文件里,TCA定向完成后,启动计算机上的“advance”,TCA将照准激光标靶并测量其坐标和方位。根据激光束在标靶上的测量点位置和激光标靶内的光栅,可以确定激光标靶水平位置和竖直位置,根据激光标靶的双轴测斜传感器可以确定激光标靶的俯仰角和滚动角,TCA可以测得其与激光靶的距离,以上资料随推进千斤顶和中折千斤顶的伸长值及盾尾与管片的净空值(盾尾间隙值)一起经掘进软件计算和整理,盾构机的位置就以数据和模拟图形的形式显示在控制室的电脑屏幕上。通过对盾构机当前位置与设计位置的综合比较,盾构机操作手可以采取相应措施尽快且平缓地逼近设计线路。
原文网址:http://www.pipcn.com/research/200806/9047.htm
也许您还喜欢阅读: