请告诉我们您的知识需求以及对本站的评价与建议。
满意 不满意
Email:
杭州市地铁一号线施工测量控制网的优化设计研究
栏目最新
- 东莞至惠州城际铁路隧道安全风险评估与管理
- 高层建筑给排水系统安装施工技术
- 高层建筑施工质量的五个控制要点
- 房屋建筑工程质量问题、原因和防止措施
- 地下停车场防水工程施工质量预控措施
- 试析绿色施工技术在建筑工程中的应用
- 施工企业预算管理措施及案例分析
- 岩溶地区隧道施工综合预报技术案例分析
- 预制块镶面现浇混凝土隧道洞门施工方法
- 建筑施工模板应用技术简析
网站最新
内容提示:应用优化设计理论,着重研究解决高精度GPS基线网的最佳网形结构设计以及如何确定稳定可靠的已知点等问题。通过对施工控制网分别进行布设方案比较、精度估算以及测量基准的稳定性检验和起始数据误差影响讨论,最终确定的测量控制系统不仅在质量上完全满足技术要求,而且其网形结构更趋合理。
1 引言
对于杭州市地铁一号线施工测量控制网而言,不仅要求具有较高的内部符合精度,而且还须保证所测设的地铁线路与现有相关建筑的有机联系。本文结合该系统施测方案的研究工作实际,应用优化设计理论,以测量控制网的精确性、可靠性、经济性为目标,分别从高精度GPS网的最佳网形结构设计以及如何确定稳定可靠的测量基准等两个方面进行较为深入的分析研究。(参考《建筑中文网》)
2 GPS网网形结构的优化设计
杭州市地铁一号线平面控制系统采用二级布网方案,首级为GPS网,二级为精密导线网。
首级网布设的初步方案是:沿地铁设计线路布设42个控制点,网的平均边长为1 5km,观测采用GPS静态相对定位方法,直接获取网中相邻控制点间的三维基线向量,因此控制网也可称为测边网。网中待定点沿地铁线路布设,整个首级网呈线状形式。
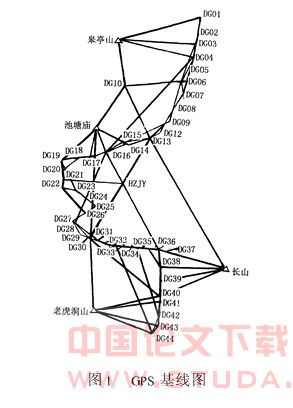
为了提高整个平面控制测量工作的成果质量,本文在原布设方案的基础上,对GPS基线网进行优化设计,选择测区附近的4个高等级已知控制点———老虎洞山、长山、池塘庙、皋亭山作为中心点与相应控制点连接,这样构成的图形不仅在结构上具有足够的强度,并且还由于增加了一定数量的多余观测而可提高控制网平差后成果的精度,具体布设网形见图1。
同时,为了使在网形结构上的改善收到更好的实际效果,在观测纲要上也作了相应改进。观测工作分两步进行,第一步:利用5台Trimble4600LS接收机进行同步观测,同步图形扩展方式以边连接为主,保证控制网的几何强度;第二步:联合4台Trimble4700接收机固定在4个高级点上进行一整天连续观测,其余5台接收机在待定点间作同步观测,由于距离较长且同时增加两个过渡点加强联结,这样就在第一步的网形基础上形成了联结整个测区的框架网。精度估算结果表明,优化后的GPS基线网点点位精度有了较大的提高,达到了平面控制网设计预定的标准。优化前后估算结果见表1。

3 已知点的精度与稳定性分析
由于本测量控制系统采用杭州市统一坐标系,因此需要选择测区附近的国家高级控制点作为起始点(已知点),采用约束平差法求得控制网中各点的三维空间坐标。其中高程基准是利用杭州市规划局2001年施测的二等水准网,通过对网中若干水准点进行点位的稳定性检验后,选择其中9个相对稳定点作为基准点。下面着重对平面控制网基准作点位精度与稳定性分析。
(1) 已知点的稳定性分析
在GPS网中,共有4个国家二等平面控制点(见图1),对这些点进行稳定性检验的实质就是分析它们的平面位置在观测周期间有否发生变动,即变形。在此采用平均间隙法进行控制点的变形分析。
作原假设H0:在两个观测周期期间,以上已知点点位均未发生变动。在此假设下,组成双观测列,其观测值为这些已知点间的边长,第一次观测值可由点的已知坐标反算求得,第二次观测值由GPS网无约束平差后求得的各已知点坐标计算得到,4个点共组成6个边长观测值。利用双观测值之差Δd可计算观测值的单位权方差估值:
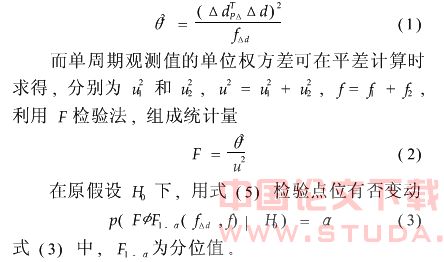
检验结果为FπF1-α,故认为网中4个已知点均为稳定点。
(2) 起始数据误差的影响分析
对于高精度的测量控制网而言,其最终成果的质量不仅取决于本级网的测设精度,同时还受到网中起始数据误差的影响,当本级网的观测精度不低于高级网时,这种影响将是显著的。考虑起始数据误差影响,就是研究这些误差对平差值及其函数中误差影响的性质、范围和大小,从而合理地选择起始点,构成最佳平差网形,使平差后的控制网具有必要的精度。
为了研究起始数据误差的影响,首先对GPS基线网的观测数据作无约束平差,这种平差是在WGS 84大地坐标系下进行的三维独立网平差,经平差后得网中最弱点的三维点位中误差为±1 80cm,最弱边相对中误差为1∶155000。这一结果说明,在不受任何起始数据误差影响的情况下,该基线网内部附和精度良好,网形具有足够强度。
再依次选择网中任意三个城市二等控制点作为起始点,组成不同的基准点组,进行控制网的二维约束平差。通过对几种不同组合网形平差结果的比较分析,并以无约束平差中的精度评定结果为依据,研究起始数据误差对控制网整体精度以及网中各控制点的点位中误差、点位相对中误差等的影响程度。结果表明,由于GPS基线网观测精度高于城市二等点间的边长精度,起始点间的点位相对中误差对本级网中控制点的点位精度产生一定影响。在分析研究的基础上,以尽可能地减小起始数据误差影响为原则,选择老虎洞山、长山、皋亭山等三个城市二等平面控制点为固定点,组成GPS基线网的最终平差图形。平差后求得网中最弱点的平面点位中误差为±1 13cm,最弱边的边长相对中误差为1∶94000,各点的平面点位精度统计见表2。

由表中数据可见,网点的点位误差分布均匀,成果质量满足本工程技术设计书的要求。
4 结论
1) 优化后的GPS基线网在网形结构上更为完善,观测纲要更加合理,观测成果质量有了明显提高,较好地实现了本文提出的优化目标。
2) GPS平面控制网选择合适的国家高级控制点为已知点,使控制网具有最佳平差网形,平差后各控制点的点位误差分布均匀,成果质量满足工程施工要求。
参考文献
[1] 吴子安.工程建筑物变形观测数据处理[M].北京:测绘出版社,1989.
[2] 孔祥元,梅是义.控制测量学[M].武汉:武汉大学出版社,1996. 来源: 《建筑中文网》.
对于杭州市地铁一号线施工测量控制网而言,不仅要求具有较高的内部符合精度,而且还须保证所测设的地铁线路与现有相关建筑的有机联系。本文结合该系统施测方案的研究工作实际,应用优化设计理论,以测量控制网的精确性、可靠性、经济性为目标,分别从高精度GPS网的最佳网形结构设计以及如何确定稳定可靠的测量基准等两个方面进行较为深入的分析研究。(参考《建筑中文网》)
2 GPS网网形结构的优化设计
杭州市地铁一号线平面控制系统采用二级布网方案,首级为GPS网,二级为精密导线网。
首级网布设的初步方案是:沿地铁设计线路布设42个控制点,网的平均边长为1 5km,观测采用GPS静态相对定位方法,直接获取网中相邻控制点间的三维基线向量,因此控制网也可称为测边网。网中待定点沿地铁线路布设,整个首级网呈线状形式。
为了提高整个平面控制测量工作的成果质量,本文在原布设方案的基础上,对GPS基线网进行优化设计,选择测区附近的4个高等级已知控制点———老虎洞山、长山、池塘庙、皋亭山作为中心点与相应控制点连接,这样构成的图形不仅在结构上具有足够的强度,并且还由于增加了一定数量的多余观测而可提高控制网平差后成果的精度,具体布设网形见图1。
同时,为了使在网形结构上的改善收到更好的实际效果,在观测纲要上也作了相应改进。观测工作分两步进行,第一步:利用5台Trimble4600LS接收机进行同步观测,同步图形扩展方式以边连接为主,保证控制网的几何强度;第二步:联合4台Trimble4700接收机固定在4个高级点上进行一整天连续观测,其余5台接收机在待定点间作同步观测,由于距离较长且同时增加两个过渡点加强联结,这样就在第一步的网形基础上形成了联结整个测区的框架网。精度估算结果表明,优化后的GPS基线网点点位精度有了较大的提高,达到了平面控制网设计预定的标准。优化前后估算结果见表1。
3 已知点的精度与稳定性分析
由于本测量控制系统采用杭州市统一坐标系,因此需要选择测区附近的国家高级控制点作为起始点(已知点),采用约束平差法求得控制网中各点的三维空间坐标。其中高程基准是利用杭州市规划局2001年施测的二等水准网,通过对网中若干水准点进行点位的稳定性检验后,选择其中9个相对稳定点作为基准点。下面着重对平面控制网基准作点位精度与稳定性分析。
(1) 已知点的稳定性分析
在GPS网中,共有4个国家二等平面控制点(见图1),对这些点进行稳定性检验的实质就是分析它们的平面位置在观测周期间有否发生变动,即变形。在此采用平均间隙法进行控制点的变形分析。
作原假设H0:在两个观测周期期间,以上已知点点位均未发生变动。在此假设下,组成双观测列,其观测值为这些已知点间的边长,第一次观测值可由点的已知坐标反算求得,第二次观测值由GPS网无约束平差后求得的各已知点坐标计算得到,4个点共组成6个边长观测值。利用双观测值之差Δd可计算观测值的单位权方差估值:
检验结果为FπF1-α,故认为网中4个已知点均为稳定点。
(2) 起始数据误差的影响分析
对于高精度的测量控制网而言,其最终成果的质量不仅取决于本级网的测设精度,同时还受到网中起始数据误差的影响,当本级网的观测精度不低于高级网时,这种影响将是显著的。考虑起始数据误差影响,就是研究这些误差对平差值及其函数中误差影响的性质、范围和大小,从而合理地选择起始点,构成最佳平差网形,使平差后的控制网具有必要的精度。
为了研究起始数据误差的影响,首先对GPS基线网的观测数据作无约束平差,这种平差是在WGS 84大地坐标系下进行的三维独立网平差,经平差后得网中最弱点的三维点位中误差为±1 80cm,最弱边相对中误差为1∶155000。这一结果说明,在不受任何起始数据误差影响的情况下,该基线网内部附和精度良好,网形具有足够强度。
再依次选择网中任意三个城市二等控制点作为起始点,组成不同的基准点组,进行控制网的二维约束平差。通过对几种不同组合网形平差结果的比较分析,并以无约束平差中的精度评定结果为依据,研究起始数据误差对控制网整体精度以及网中各控制点的点位中误差、点位相对中误差等的影响程度。结果表明,由于GPS基线网观测精度高于城市二等点间的边长精度,起始点间的点位相对中误差对本级网中控制点的点位精度产生一定影响。在分析研究的基础上,以尽可能地减小起始数据误差影响为原则,选择老虎洞山、长山、皋亭山等三个城市二等平面控制点为固定点,组成GPS基线网的最终平差图形。平差后求得网中最弱点的平面点位中误差为±1 13cm,最弱边的边长相对中误差为1∶94000,各点的平面点位精度统计见表2。
由表中数据可见,网点的点位误差分布均匀,成果质量满足本工程技术设计书的要求。
4 结论
1) 优化后的GPS基线网在网形结构上更为完善,观测纲要更加合理,观测成果质量有了明显提高,较好地实现了本文提出的优化目标。
2) GPS平面控制网选择合适的国家高级控制点为已知点,使控制网具有最佳平差网形,平差后各控制点的点位误差分布均匀,成果质量满足工程施工要求。
参考文献
[1] 吴子安.工程建筑物变形观测数据处理[M].北京:测绘出版社,1989.
[2] 孔祥元,梅是义.控制测量学[M].武汉:武汉大学出版社,1996. 来源: 《建筑中文网》.
原文网址:http://www.pipcn.com/research/200810/13566.htm
也许您还喜欢阅读: