请告诉我们您的知识需求以及对本站的评价与建议。
满意 不满意
Email:
北京地铁铰接式土压平衡盾构测控系统的消化吸收
栏目最新
- 改进的隧道监测系统(TMS)在隧道围岩变形监测中的应用
- 我国岩土工程在可持续发展中的新使命及其实现问题
- 矿山地质环境治理问题研究
- 岩土工程勘察中常见的技术问题及解决措施探讨
- RTK-GPS在广州新电视塔变形监测中的应用研究
- 既有建筑物加固修缮勘察与地基基础加固方案选择
- 现场测量建筑围护结构节能特性的问题分析
- 文物保护建筑勘察特点及工程实例分析
- 旁侧荷载对复合地基性状的影响
- 从工程实例分析谈顺层岩质边坡的勘察与参数选取
网站最新
内容提示:概括介绍了日本小松公司生产的铰接式土压平衡盾构的功能和特点,以及测控系统的组成和设计思想,剖析了盾构的控制和操作方法,总结了测控系统的特点,对国产盾构测控系统的设计提出了建议。
摘要:概括介绍了日本小松公司生产的铰接式土压平衡盾构的功能和特点,以及测控系统的组成和设计思想,剖析了盾构的控制和操作方法,总结了测控系统的特点,对国产盾构测控系统的设计提出了建议。(参考《建筑中文网》)
关键词:地铁;铰接式土压平衡盾构;盾构测控系统;消化和吸收
1盾构概况
北京地铁4号线颐和园至圆明园之间的隧道施工,采用日本小松公司生产的铰接式土压平衡盾构。它将穿越砂砾复合地层,推进距离约1.5km。该盾构主要参数有,直径:Ф6140mm;长度:8570mm;推进速度:0~8.5cm/min;总推力:37730kN。铰接式土压平衡盾构主要部件的功能和特点如下:
(1)大刀盘是通过9台刀盘电机来驱动,再由5台变频器控制刀盘电机,实现刀盘转速的选择和切换。刀盘速度设有五档分别为0.5、0.7、1.1、1.6、2.2r/min。
(2)螺旋机由1个液压马达来拖动,它可通过比例阀进行无级调速,螺旋机调速范围为0~25r/min。
(3)螺旋机有伸缩功能,维修时可将螺旋机轴缩回关闭前部二道螺旋机闸门,使螺旋机与泥土仓完全隔离。
(4)推进系统由推进泵带动分成四区的22个推进千斤顶,并通过一个比例阀对油压进行调整和控制来调节推进速度。
(5)铰接系统由铰接泵带动4个铰接千斤顶进行上、下、左、右的转动与全伸、全缩等动作,调整盾构的推进姿态。
(6)拼装回转和螺旋机闸门合用1台液压泵,分别在拼装/推进状态中使用。
(7)皮带机在运行前,予报警5s,才能正式运转。在皮带机两边设有拉绳式紧停钮,可以紧急停止皮带机。
(8)盾尾油脂设前后二道密封,由1台盾尾油脂密封泵每道各分6个点进行压注。
(9)有2台集中润滑油脂泵(简称油脂泵)分连续和间断二个工作状态分别注入油脂。
(10)有1套稀油润滑循环泵(简称循环泵)进行润滑油的加注。
(11)用2台泥浆泵通过变频器调节加泥流量。向土仓内加泥浆。
(12)由注浆泵和搅拌机组成的注浆系统可进行单液浆压注,有清洗管道功能。
(13)有1套泡沫装置可发生泡沫注入盾构前方土体中。
2盾构测控系统
2.1盾构控制系统
盾构控制系统主要由PLC可控制编程控制器和显示操作终端机组成。PLC采用主从结构,有1个主站和2个从站,另有一套注浆PLC。见图1
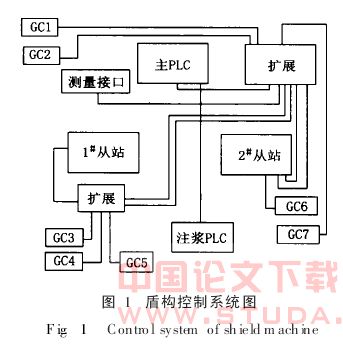
PLC可编程控制器采用日本三菱公司制造的Ans系列产品。该盾构采用的A2USHCPU组件是当今世界上最先进的微型化PLCCPU之一。它采用三菱顺控处理器(MSP),使得其可以达到与许多大型、更昂贵的PLC相媲美的速度和功能。
PLC主站设在控制台,主CPU型号为A2USHCPU-S1,带3个显示操作终端机,编号为GC1、GC2、GC7。其中GC1、GC2分别操作盾构设备,互为备用。另一个GC7操作加泥设备。
1#从站设在盾构内,带3个显示操作终端机,编号为GC3~5。其中GC3、GC4操作盾构千斤顶,GC5远程操作注浆。2#从站设在2#车架,带1个显示操作终端机(俗称触摸屏),编号为GC6,操作注浆设备。

主站同1#、2#从站通过两个并行的电缆环路连接(双环网)。系统采用了高速可靠的数据通信,即MELSECNET/Ⅱ数据通信系统,它采用2个并行的电缆环路连接各PLC站,其中一个称之为正向环路(或主环路),另一个称之为反向环路(或副环路)。当主环路内发生电缆断裂,通信自动切换到副环路,继续保持数据通信。如果2个环路均断裂或者均脱接,除断裂的PLC,连接的站之间仍保持继续通信。
注浆PLC独立于PLC系统外,型号为:FX1N-40MR,通过I/O口同PLC主站进行信号的交换。
PLC配置了开关量输入/输出组件、模拟量输入/输出组件、通信接口组件和计算机通信组件。详见表1PLC配置表。
2.2姿态测控系统
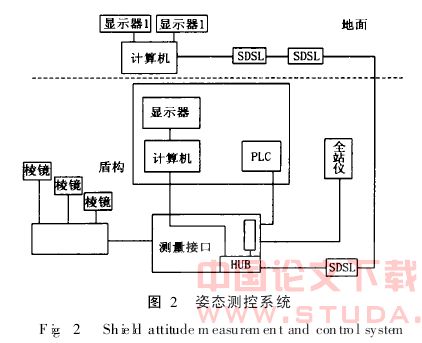
盾构的姿态测控系统由盾构和地面2个部分组成。盾构部分主要有全站仪、棱镜、测量接口、控制单元、计算机(显示器)等设备组成。地面部分主要有计算机(显示器)和集线器等设备组成,盾构与地面部分通过一对兆比特调制解调器(SDSL)进行信号的联接。见图2。
该系统通过高精度的测量仪器和专用软件来实现盾构姿态的自动测量,可以取得实时的数据信息有:
①后视点、站的坐标和登录名称;
②测量目标的数据;
③测量时的盾构俯角和转角;
④盾构前、中、后的坐标值,方位偏差等计算结果。
在盾构内,全站仪测量得到的姿态信号和PLC获取的盾构施工信号在测量接口单元中集成在一起,在盾构计算机显示器上显示,并送地面计算机。
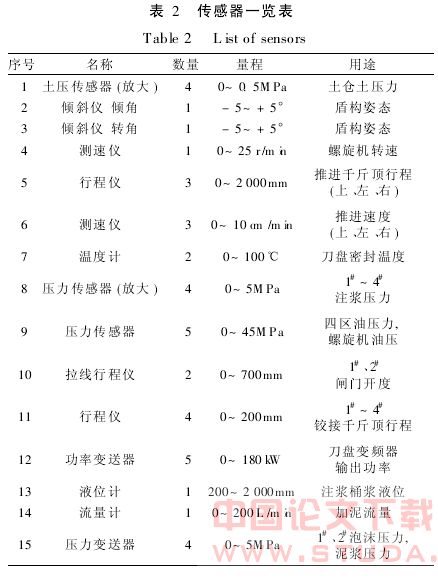
根据盾构测控系统的需求,配置了基本的检测仪器,检测的模拟量信号有:土仓土压力,推进千斤顶油压、行程、速度,四区油压,螺旋机油压、转速,铰接千斤顶行程,刀盘变频器输出功率,刀盘密封温度,螺旋机闸门开度,注浆压力,注浆桶浆液位,泡沫压力,加泥压力,加泥流量,盾构的坡度和转角等。配置的传感器(变送器)共有40多套,见表2。
另外,对开关量信号的检测,配置了60余个限位和10多个压力继电器。主要检测拼装机回转左/右限位状态,拼装机电缆盘左/右限位状态,螺旋机的伸/缩状态,螺旋机闸门的开/关状态,气阀、加泥阀、注浆阀、盾尾密封阀的开/闭状态,集中润滑的油脂油位,盾尾油脂油位等,以及集中润滑油脂泵和管道的压力高/低,盾尾密封油压高低,稀油润滑堵塞等信号。
2.4盾构的控制和操作
2.4.1盾构的控制
盾构的主要控制有:土压平衡控制、顺序控制和逻辑控制等。
①土压平衡控制是盾构的主要控制,正面土体扰动,使土仓土压发生变化时,它同设定值之间产生一个偏差值,通过自动控制螺旋机回转速度调节泥土输出量来减少偏差量,达到土仓土压动态平衡在设定值上。
②顺序控制是在推进状态下,结合时序、逻辑等控制条件,使推进设备按正常的工作顺序进行:冷却泵运行→润滑泵运行→刀盘转动→螺闸门开→皮带机转动→螺旋机转动→推进千斤顶动作。不按顺序操作将不能使盾构正常工作。
③逻辑控制是盾构对每个设备按特定的逻辑关系所制定的控制,如推进时,若发生刀盘扭矩过载或螺旋机反转,或推进速度过速或土压超过上限时,按逻辑条件就将停止推进千斤顶的伸出动作。又如铰接必须在铰接泵运行正常、刀盘正常转动、铰接角度在正常范围内时进行上、下、左、右转动与全伸、全缩等控制,当某个条件不存在时,立即结束铰接控制。
联锁条件是盾构控制不可缺少的,盾构中所有设备均涉及联锁条件,如当电源反相、PLC通信故障时,各设备均不能工作。有些设备的动作是互锁的,如前闸门开关时不能进行螺旋机的伸缩与螺旋机出土闸门或拼装机回转的控制,反之相同。这些联锁条件在任何情况下均不能解除,而有些设备在非正常情况下,可以通过解除联锁来单独控制某个设备,如解除刀盘联锁的方法使刀盘停止运行,就可以单独控制皮带机或螺旋机的运行了。
2.4.2盾构的操作
在操作台通过按钮、旋钮可以操作刀盘、螺旋机、皮带机的运转和停止,刀盘速度的选择,推进千斤顶的选择和伸缩以及螺旋机闸门的开与关等。而大量的其它操作是在触摸屏上进行的。
控制台上有2个触摸屏分上下排列。它有:“运转显示”、“检测显示”、“泵启动”、“推进”、“辅助操作”、“其它设定”、“异常显示”等画面。平时,上触摸屏只可以操作一些显示画面,下触摸屏只可以操作一些操作画面。当一台触摸屏故障时,可以把故障一台的画面切换到正常的一台上,即可操作所有的画面。
①“运转显示”画面:主要显示各设备的状态,如刀盘电机、推进泵、螺旋机、皮带机、盾尾油脂泵、拼装平移泵等设备的运行状态;后闸门、前闸门、人行闸门的开/闭状态,螺旋机千斤顶的伸/缩,推进条件确认,异常状态等等。
②“检测显示”画面:主要显示设备和施工数据,如刀盘密封温度、盾构姿态角度、铰接角度、推进行程、推力中心位置、四区推力、土压力、后闸门开度、刀盘转速和扭矩、推进速度和推力、螺旋机速度和油压、刀盘转数累计等。
③“泵启动”画面:主要操作推进、螺旋机、拼装以及其它泵的启和停以及显示运转状态。
④“推进”画面:主要操作推进千斤顶的选择、四区油压加/减、千斤顶同步设定、推进速度切换等,显示推力中心位置、四区推力、总推力、千斤顶行程、推进速度等,另有操作引导指示。
⑤“辅助操作”画面:主要操作铰接系统和盾尾油脂系统的设备,并显示这些设备的运行状态。
⑥“其它设定”画面:由多幅分画面组成,可对系统和土压的参数进行设定。在控制室还有2个触摸屏,一台操作加泥设备,另一台操作注浆设备。
原文网址:http://www.pipcn.com/research/200808/9098.htm
也许您还喜欢阅读: