请告诉我们您的知识需求以及对本站的评价与建议。
满意 不满意
Email:
基于视频流的地铁人群目标识别
栏目最新
- 工程爆破行业的信息化发展现状、实施问题和建议
- BIM技术及在工程项目管理模式中的应用
- 建筑扬尘污染监控平台中的Kerberos协议改进
- 云计算安全研究参考文献
- 云计算安全研究报告(5):云计算安全关键技术研究
- 云计算安全研究报告(4):云计算安全技术框架建议
- 云计算安全研究报告(3):云计算安全现状
- 云计算安全研究报告(2):云计算安全挑战
- 云计算安全研究报告(1):云计算发展趋势
- 大型集团型建筑企业工程管理信息化工作探索
网站最新
内容提示:地铁站内人群数目及分布的在线监测是有效控制和疏散客流,保障地铁安全的重要依据之一.利用站内现有的闭路电视监视系统,通过计算机视觉技术实现人群数目的自动识别是目前国外普遍采用的一种方式.文中提出了一种结合了自适应背景差分和比例自适应模板匹配的算法,用背景减除对图像进行分割,然后再利用比例自适应模板对感兴趣的区域进行搜索匹配,识别目标人群的数目及位置分布.该算法能有效减少传统模板匹配的计算量,
摘 要:地铁站内人群数目及分布的在线监测是有效控制和疏散客流,保障地铁安全的重要依据之一.利用站内现有的闭路电视监视系统,通过计算机视觉技术实现人群数目的自动识别是目前国外普遍采用的一种方式.文中提出了一种结合了自适应背景差分和比例自适应模板匹配的算法,用背景减除对图像进行分割,然后再利用比例自适应模板对感兴趣的区域进行搜索匹配,识别目标人群的数目及位置分布.该算法能有效减少传统模板匹配的计算量,提高匹配的准确率,在一定误差范围内可以达到较好的效果.
关键词:人群识别;图像处理;模板匹配
地铁作为一种大容量、快速的客运方式,在城市交通中扮演着重要的角色.地铁安全日益引起人们的重视,地铁站内的客流数据是有效进行客流控制、优化站内布局、保障地铁安全的重要信息.本文的目的在于,利用目前地铁站内使用的闭路电视监控系统(CCTV),实现对站内人群数目及分布的实时自动识别.
基于图像处理的人群识别,关键在于准确性和实时性,这是一个多目标的识别问题.关于人的识别,目前常用的方法大致有:①基于特征的方法,如利用人脸部特征[1]、步态特征[2]、肤色特征[3]等;②基于模板匹配的方法,如头肩模板[4]等;③基于学习的方法,如基于神经网络的处理方法[5]等.在地铁车站环境内,人体特征均有可能被遮挡;而传统的模板匹配通常具有计算量庞大的缺陷,无法达到实时的检测.因此,本文作者提出了一种结合自适应背景差分和比例自适应模板匹配的方法.即首先利用背景差分进行图像分割,确定出模板匹配时的搜索区域,然后在原图的边缘图像中进行比例自适应的头部模板匹配.图像分割能有效减少模板匹配的计算量,采用比例自适应头部的模板减少了行人之间的遮挡现象,提高了匹配精度.
1 基于自适应背景差分的图像分割
自适应背景模型是考虑到环境中的光线变化等因素而提出的一种可以不断更新的背景模型.利用图像和自适应背景模型的差分,可以有效的分割图像,得到包含目标的前景图像.文中采用的是基于Kalman滤波器的自适应背景模型.
1.1 Kalman自适应背景模型的提取
Kalman自适应背景模型的提取分为两个步骤:背景预测和背景校核.背景图像的预测公式为


表示增益值的取值,thd为设定的阈值.
计算某一时刻的背景模型时,首先利用上一时刻的背景模型,按照式(1)得到当前时刻的背景预测,然后将背景预测带入式(3)进行校核.
利用Kalman自适应背景模型差分后得到的图象如图1所示.其中,背景用白色表示,前景区域用被处理图像的原灰度表示.
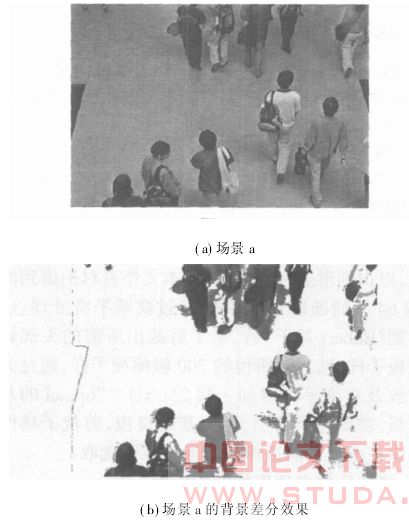
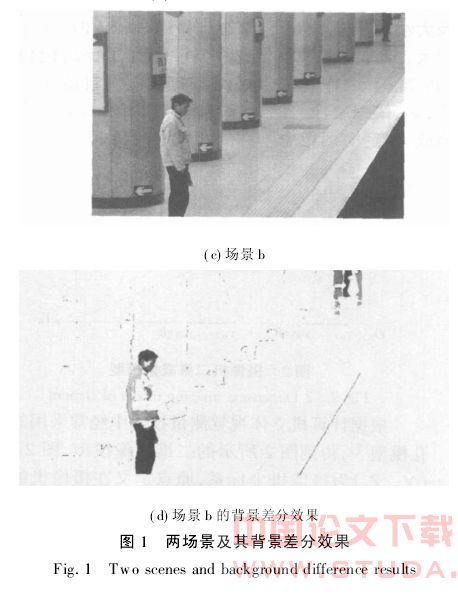
可以看出,Kalman自适应背景模型能够准确地分割图像.
在模板匹配中,感兴趣的只是包含了目标的前景区域,因此,在匹配前先利用图像分割的结果判断该像素点是否为前景.若是前景,就对该像素点进行模板相似度的计算,否则忽略该点.
2 人群目标识别
选择遮挡现象较少的头部作为识别对象,并且针对图像中目标的大小变化提出了基于头部模板比例自适应匹配人群目标识别的方法.
2.1 基础模板的生成
基础模板是指衍生出其他模板的初始模板.它直接影响到最后的识别效果,因此需要慎重选择,即要包含待识别目标的特征信息,又要具有一定的普遍性,以识别形态各异的目标.本文作者对拍摄到的50幅64人的场景a的图片,经过高斯平滑处理、边缘检测(Robert算子)后,手工剪裁出所需的头部轮廓模板子样.然后对所得的200幅模板子样,通过大小缩放及灰度平均得到一幅25pixel×26pixel的基础模板.需要注意的是,作为基础模板,剪裁子样的时候应在图片中离摄像机较近的位置选取.
2.2 模板比例自适应的搜索匹配
目标处于同一场景的不同位置时,在图片上的成像大小也会不同.当目标距离摄像头较近时,成像比较大,即占像素比较多,反之较小.为了提高模板识别的准确率,作者提出了一种模板比例自适应的方法,即,依据摄像机的成像规律对基准模板进行比例缩放,以适应图像中不同的区域中的目标.
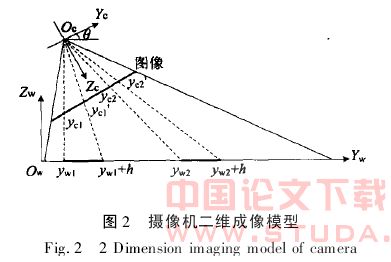
根据计算机立体视觉测量技术中经常采用的针孔模型[7],得到图2所示的二维成像模型.图2中,(Yc,Zc)为摄像机坐标系,原点定义在摄像机的光心,Zc轴为摄像机的光轴;(Yw,Zw)为世界坐标系,Zw轴垂直于水平面,将原点定义在Yc轴与Yw轴的交点处;θ为摄像机与地面的拍摄角度,拍摄到的图像垂直于Zc轴.
假设地面上有一个长度为h的物体从图2中的yw1运动到yw2,两个位置对应于成像照片上的位置分别为yc1和yc2,设成像长度分别为h1和h2,则图2中yc1′=yc1 h1,yc2′=yc2 h2.
根据文献[5]中给出的摄像机坐标系与世界坐标系之间的关系,可以导出

进行模板匹配前,通过在实际场景中的测量,按照距离摄像机由近及远均匀标定出5个区域,然后在图像中计算出对应的各个区域的长度,依此作为选择模板的界限.匹配时,给定的基础模板作为最近区域的模板,搜索进入某个区域时,就利用根据式(4)计算出的比例对模板进行缩放.采用归一化的相似函数R(i,j)作为模板与子图像的相似性测度.R(i,j)=
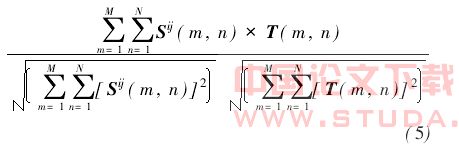
式中,T是Mpixel×Npixel的模板图像,Sij是位于原图像(i,j)处被模板图像覆盖的Mpixel×Npixel的子图像.当R(i,j)大于某一设定的阈值时,认为该子图像与模板图像相似,即为目标.
图3是场景a、b的边缘检测结果及模板匹配的结果.
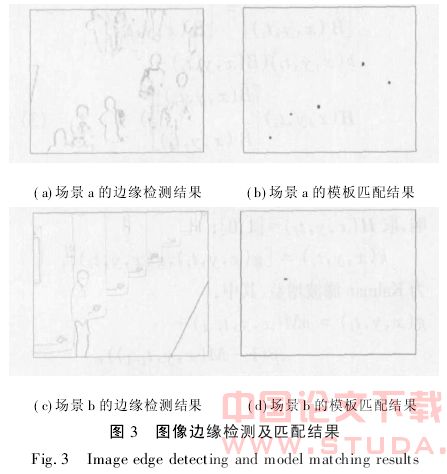
匹配过程中,算法可以记录匹配点在图像中的位置,即三维针孔模型中匹配点在图像坐标系(x,y)中的坐标值.根据
可以将图像坐标系中的坐标值(x,y)转化为世界坐标系中的坐标值(Xw,Yw,Zw),从而定位到实际拍摄场景中,其中M为摄像机的参数矩阵.
3 实验分析
实验软硬件环境:普通CCD摄像头,MatroxCrona图像采集卡,P41.5GHzCPU,256M内存等;采集图像格式为windows位图(BMP),大小为384pixels×288pixels;在MicrosoftVisualC 的开发环境下完成算法的实现.
实验对图1中场景a的70张连续视频图像进行了识别,其中共包含需要识别的行人实际数目为176人,系统自动识别出来的有173人,漏检11人,错检8人,平均识别率为72.9%左右.对于行人较少且分布分散的情况,识别准确率高于行人分布密集的情况,如人数少于3人的图像的识别率可以高达到77.5%,而人数多于3人的图像的识别率只能达到66.7%.另外,如果行人头部出现一些装饰物的时候,会给识别带来一定困难.
4 结论
针对多目标识别,提出了一种结合了背景分割的比例自适应模板匹配方法,减少了传统模板匹配的计算量,满足了目标在图像中由于运动引起的大小变化的要求,在实验环境下能够达到满意的效果.该检测方法针对形态复杂的人群,对于严重遮挡现象不能识别的问题还有待于进一步完善.
参考文献:
[1]田原,梁德群.图像中人脸和眼睛的定位及其分割方法的研究[J].西安交通大学学报,1998,32(3):17-20.TIANYuan,LIANGDe_qun.TheStudyofMethodforFacesDetectionandSegmentation[J].JournalofXi’anJiaotongUniversity,1998,32(3):17-20.(inChinese)
[2]CristobalCurio,JohannEdelbrunner,ThosmasKalinke,etal.WalkingPedestrianRecognition[J].IEEETransac-tionsonITS,2000,1(3):155-163.
[3]LeeSH,LeeMS.PresentConditionofResearchonFa-cialImageRecognitionTechnology[J].TheInstituteofElectronicEngineersofKorea’sCollectionofPaper,1996,23(6):80-94.
[4]阮鹏,赵明生.一种头肩像序列的人脸快速定位算法[J].计算机工程及应用,2003,39(29):125-127.RUANPeng,ZHAOMing_sheng.AFastFaceLocationAlgorithmforHead_and_ShoulderSequence[J].ComputerEngineeringandApplications,2003,39(29):125-127.(inChinese)
[5]MaranaAN,VelastinSA,CostaLF,etal.EstimationofCrowdDensityUsingImageProcessing[C]∥IEECol-loquiumonImageProcessingforSecurityApplications,Di-gestNo:1997/074.London:IEE,1997:11/1-11/8.
[6]StefanHuwer,HeinrichNiemann.AdaptiveChangeDe-tectionforReal_TimeSurveillanceApplications[C]∥Vi-sualSurveillance,2000.ProceedingsofThirdIEEEInter-nationalWorkshop2000.Dublin:IEEEComputerSocietyPress,2000:37-46.
[7]沙玲,吕朝辉.立体视觉测量中的一种摄像机标定方法[J].机械制造,2003,41(5):10-11.SHALing,LUChao_hui.ACameraCalibrationMethodforStereoscopicVisionMeasurement[J].Machinery,2003,41(5):10-11.(inChinese)
原文网址:http://www.pipcn.com/research/200808/9046.htm
也许您还喜欢阅读: