请告诉我们您的知识需求以及对本站的评价与建议。
满意 不满意
Email:
自动变形监测系统在地铁结构变形监测中的应用
栏目最新
- 改进的隧道监测系统(TMS)在隧道围岩变形监测中的应用
- 我国岩土工程在可持续发展中的新使命及其实现问题
- 矿山地质环境治理问题研究
- 岩土工程勘察中常见的技术问题及解决措施探讨
- RTK-GPS在广州新电视塔变形监测中的应用研究
- 既有建筑物加固修缮勘察与地基基础加固方案选择
- 现场测量建筑围护结构节能特性的问题分析
- 文物保护建筑勘察特点及工程实例分析
- 旁侧荷载对复合地基性状的影响
- 从工程实例分析谈顺层岩质边坡的勘察与参数选取
网站最新
内容提示:介绍了以TCA 自动化全站仪为基础组成的自动变形监测系统和广州地铁“非地铁施工时地铁结构变形监测”项目的现场方案及优化设计。实际应用表明,该系统稳定可靠,可以胜任地铁结构变形监测的工作。
摘要:介绍了以TCA 自动化全站仪为基础组成的自动变形监测系统和广州地铁“非地铁施工时地铁结构变形监测”项目的现场方案及优化设计。实际应用表明,该系统稳定可靠,可以胜任地铁结构变形监测的工作。(参考《建筑中文网》)
关 键 词:变形观测;地下工程测量;差分
在城市基础设施中,城市的交通体系位居首位,而地铁在城市综合交通体系中一般都担当骨干。同时,地铁沿线非地铁工程建筑也越来越多。为了保证地铁的正常运营,必须对地铁进行变形监测,特别是在非地铁施工可能影响到地铁结构时。广州地铁一号线已正常运营3 a 。在某一地铁站附近设立商业城,需要挖掘12 m 深的基坑。为了监测基坑开挖对车站结构的影响,而又不中断地铁的正常运营,就不能采取传统的监测手段, 必须寻求新的监测方法来保证地铁的安全。受广州地铁保护办的委托,我们开发了自动变形监测系统,对地铁结构进行变形监测。
1 监测系统组成
如图1 所示,监测系统由全站仪观测站、基准点(2 个断面, J11 、J12 与J21 、J22)、变形点(5 个断面,D11 、D12 、D13 与D21 、D22 、D23 、D24 等) 、中继站计算机和远程监控计算机等组成。全站仪观测站与中继站计算机由供电和通讯电缆联接起来, 远程计算机通过因特网控制中继站计算机,可监视并控制监测系统的运行。
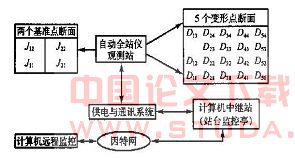
图1 监测系统框图
2 监测系统现场设备安装
监测系统在地铁站的安装设备分布情况如图2 所示。
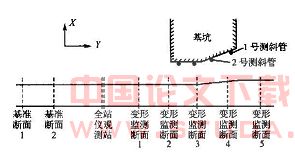
图2 监测系统设备安装分布图
2. 1 全站仪观测站
特制的仪器墩安装在地铁左行线的站台下, 完全符合“区间直线地段矩形隧道及车辆界限”的有关安全规定,如图3 所示。
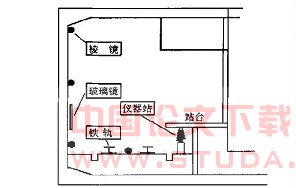
图3 观测站与监测点安装图
自动化全站仪TCA 通过基座固定在仪器墩上,并用特制的D 型玻璃钢罩保护起来。为了便于观察监控,在站台对面的站墙上安装一块60 cm ×80 cm 的平面玻璃镜,在仪器站两边安装照明设备。这样管理人员在站台上就可通过平面镜来观察仪器的运行情况。
2. 2 基准点和变形点
基准点和变形点均设置在地铁站的左行线上。在仪器站到基坑的方向上,从30 m 处开始, 每隔15 m 设置一变形点监测断面(如图2 所示), 在每一个断面上安装3~4 个反射棱镜,分布在铁轨中央1 个,站墙上、中、下各1 个(如图3 所示) 。基准点设置在仪器站的另一侧,离仪器站65 m 处为第1 个基准断面,40 m 处为第2 个基准断面。每个断面上安装2 个反射棱镜,分布在铁轨中及站墙下。所有反射棱镜均采用52 mm 直径的角反射棱镜,有L 型和O 型两种,根据不同的现场条件来选用。设置基准点与变形点的位置特别要利用仪器的小视场功能,使之均匀分布在仪器望远镜的视场内,相互不受干扰。
2. 3 中继站计算机
中继站计算机设置在地铁站的监控亭内,选用“联想”商用机。使用的软件为信息工程大学测绘学院和徕卡郑州欧亚测量系统有限公司开发的“ADMS 自动变形监测软件”,完全中文界面,便于操作与二次开发。
2. 4 供电和通讯系统
由于整个系统工作在地铁运行的环境中,220 V 主电网的供电应该是有保证的,因此无需设置U PS 供电系统。220 V 的交流供电由站台照明配电室提供线路。由于全站仪观测站与中继站计算机的通讯在100 m 以内,经特殊处理后,RS232 接口可直接通讯。
3 监测系统软件ADMS 简介
ADMS ( Automatic Deformation Monitoring System) 自动变形监测软件是在学习、消化、吸收瑞士Leica 公司研制的自动极坐标测量系统AP2 SWin(Automatic Polar System for Windows) 的基础上,通过实际的工程应用,并结合国内用户的实际需求,研制出的本地化智能型自动变形监测中文软件。
ADMS 软件提供了以下功能:对所要测量的点位进行初始的学习测量;在用户设置的时段内自动地进行测量;当目标被遮挡及测量超限时智能化地处理;“小视场”功能,当隧道中同一侧的测点很多时,全站仪就会照错棱镜,该功能使仪器视场变小,从而避免了这个问题;实时多重差分改正,最大限度地消除或减弱多种误差因素;测量结果实时显示,并可以以ASCII 码文件输出; 变形趋势实时图解显示,并可按照用户所要求的格式进行报表输出;变形量超过限差值时自动报警;可以自动地执行用户编制的外部程序,具有良好的开放性;数据库容量巨大,测量周期数没有限制, 并且每个测量周期的测点数也没有限制。
本软件还可以对数据库进行适当的压缩以更好地利用存储空间;测量数据可以实时采集,也可以事后输入;多重差分可以实时改正测量数据,也可以事后进行;计算机突然断电后,再来电开机, 将自动运行ADMS , 自动初始化全站仪,按照原来设置的各项参数自动开始下一个周期的测量。
系统的变形点19 个,基准点4 个,共计23 个,每个点正倒镜观测2 测回,全部测完23 个点称为1 个周期,用时约20 min 。每个小时测量1 次,每天可采集24 个周期的原始数据。在每小时中, 测量约占20 min , 观测结束后15 min 全站仪自动关机,25 min 后再次开始下一个周期的测量。
5 测量数据分析
为监测地下商业城南端近地铁段基坑围护结构的变形,采用传统方法在基坑南侧(地铁段) 布设了4 个测斜管(见图2) ,以观测地铁站墙的变形。测斜管采用美国SINCO 公司生产的数字测斜仪,埋设与站墙同深度,为13 m 。每0. 5 m 测试1 点,经过数据处理,得到基坑开挖过程中站墙在不同深度的变形。
表1 为基坑开挖进程。

在基坑开挖进行锚杆施工过程中,1 、3 、4 号图4 为2 号测斜管从8 月17 日9 月13 日的观测测斜管受到损坏,只有2 号测斜管可以进行监测。数据按不同的深度绘制的位移量图形,图中的位移向基坑内为正,向基坑外为负。靠近2 号测斜管的为第3 、4 变形监测断面。图4 所示的虚线(8. 4 m 深度) 处与变形监测点D34 、D44 同高程。图5 、图6 为全站仪测得的变形点D34 、D44 从8 月12 日9 月26 日的位移数据,其中X 方向向基坑内为正, 横轴的日期为月日, 如“812”表示8 月12 日。
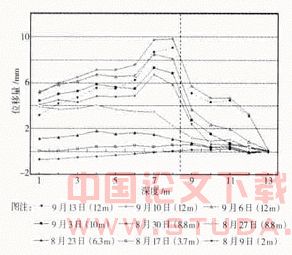
图4 2 号测斜管观测数据的位移图
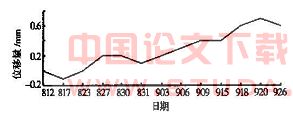
图5 D34 点的全站仪观测位移图
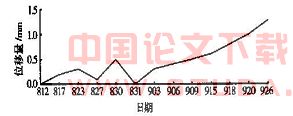
图6 D44 点的全站仪观测位移图
由图4 、5 、6 可以看出,全站仪观测的变形趋势与测斜管观测的结果一致。由于测斜管埋设在土中,而全站仪观测的棱镜安装在地铁的结构上, 故棱镜的位移量较小。
采用ADMS 系统进行地铁结构的自动变形监测,具有以下特点与优点:
1) 在无人值守的情况下,可以实现全天24 h 连续地自动监测。在列车运行时,系统也可以自动进行监测,克服了传统测量方法的不足,节约了大量的人力,为地铁提供了实时的安全运营保障。
2) 建立高精度的基准点,采用实时差分式的测量方案,可以最大限度地消除或减弱多种误差因素从而大幅度地提高测量结果的精度。
3) 简化了气象等附加设备,为系统在计算机控制下实现全自动、高可靠的变形监测,创造了有利条件。
4) 实时进行数据处理、数据分析、报表输出及提供图形等。
5) 自动报警。
6) 在短时间内同时求得被测点位的3 维坐标,可根据设计方案的要求作全方位的预报。
7) 系统维护方便,运行成本低。
面对广泛的非地铁项目的工程建筑活动,采用ADMS 系统的监控方法,可以有效地保护地铁结构安全运行。而且这种保护行为,时间上与地铁运营线路的生命周期共存,空间上与地铁运营线路的网络拓展规模同在,其意义重大。
参考文献:
[ 1 ] 张良琚,徐忠阳,包欢. 自动极坐标差分测量系统及其在大坝外部变形监测中的应用[J ] . 测绘通报,2001 ,(9) .
[ 2 ] J GJ/T 8 -97 , 建筑物变形测量规程[ S] .
[ 3 ] 陈永奇,吴子安,吴中如. 变形监测分析与预报[ M ] . 北京: 测绘出版社,1998.
原文网址:http://www.pipcn.com/research/200808/13656.htm
也许您还喜欢阅读: